
SENSORS
I’ve spent time over the last couple of weeks discovering the pros and cons of my different sensor options. I was originally using an Infrared proximity sensor but found that the range was way too small.
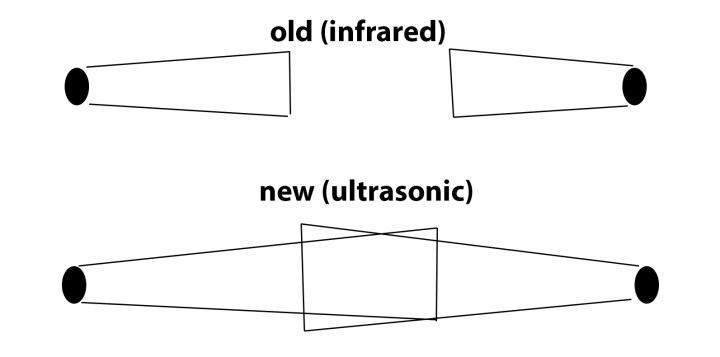
I switched to an Ultrasonic rangefinder, and it has much more of the range I’m looking for. The problem is, my original design of having two sensors facing each other from opposing ends of the room becomes shoddy using these sensors because they interfere with each other, like so:
To counter this problem I switched the sensor position onto the Purple Wall itself, facing out towards the user, which alters the experience of the installation, and I’m not sure if it’s in a good way or not yet. The altered design looks like this, removing interference of the sensors with each other:
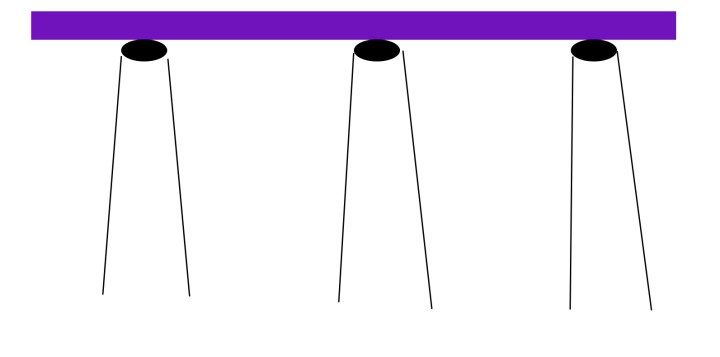
The fundamental difference in experience here is that instead of moving closer and further from the sensors, you are simply entering and exiting their fields of range, activating a more boolean “on” or “off” function. It is still possible to have a secondary feature where the volume raises depending on how close you are to the wall, but the focus of the installation becomes more about the divided placement in one of these 3 camps rather than the fading through them on a spectrum… But maybe that’s a more accurate way to express it’s statement anyway?
MAX/MSP SERIAL
I also figured out how to get the Serial object working in Max. The problem was very simple: I was failing to use a “metro” object to activate the serial on loop. Adding this allows me to now get a proximity reading into Max and use it to alter the volume or color of the video.
